Case Demonstration——PMSM_SYSGEN
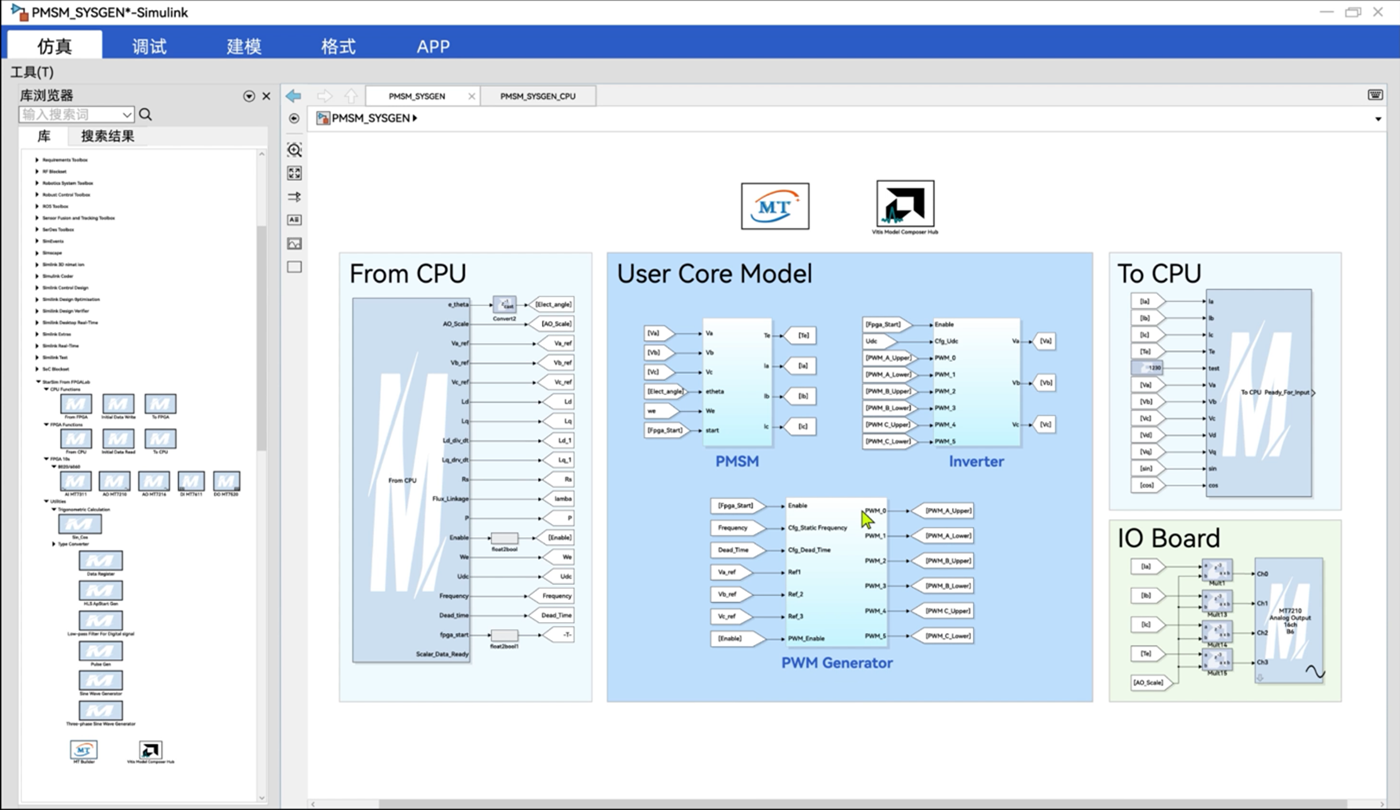
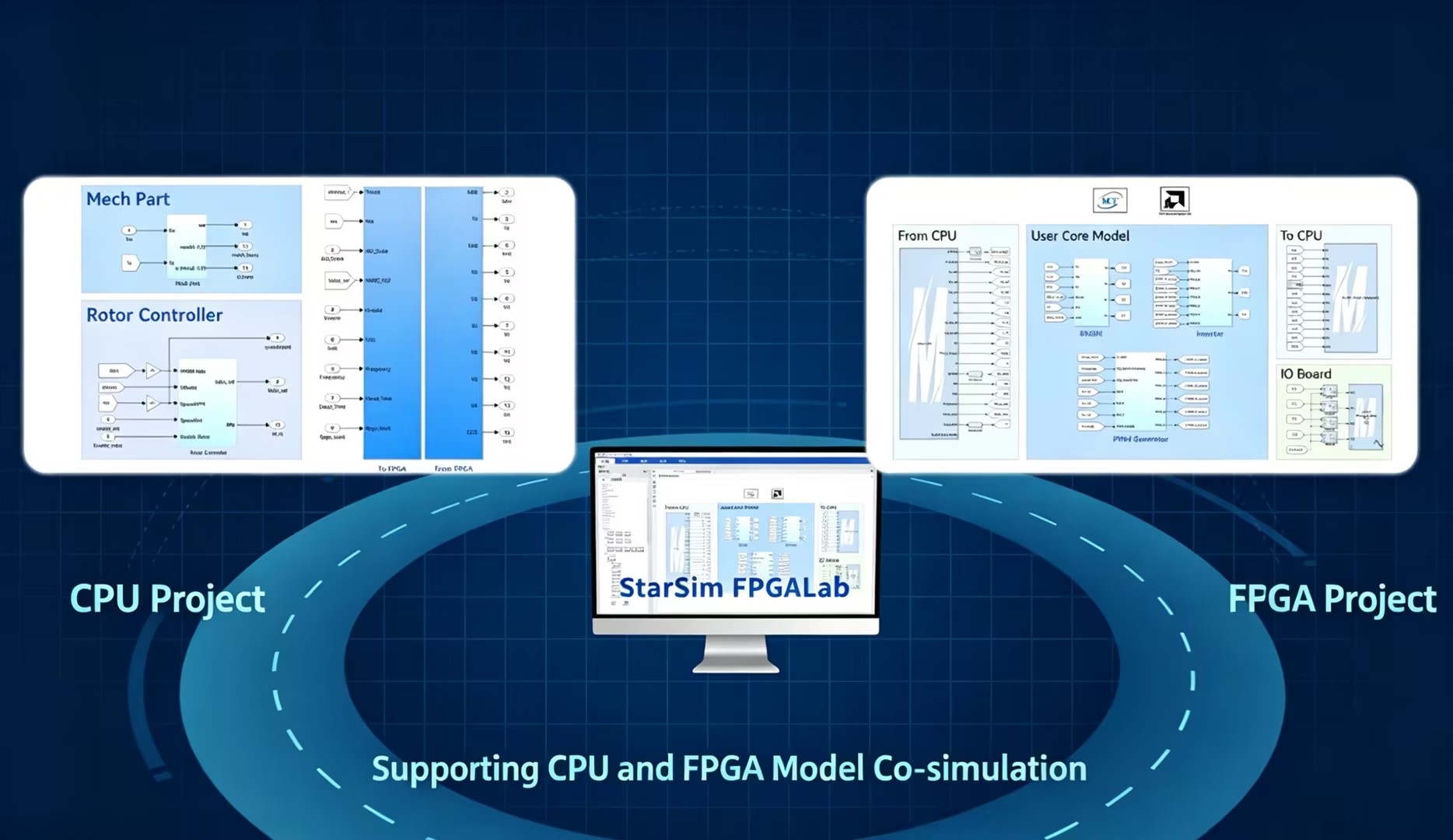
Take a PMSM motor model built with System Generator as an example: the mechanical part is deployed on the CPU model, while the electromagnetic part runs on the FPGA model.
The FPGA calculates motor currents and electromagnetic torque based on the electrical angle and angular velocity transmitted from the CPU, then uploads the calculated results back to the CPU.
The CPU generates updated electrical angle and angular velocity values according to the electromagnetic torque data received from the FPGA, and sends them back to the FPGA. All electromagnetic modules of the motor on FPGA are constructed via System Generator.
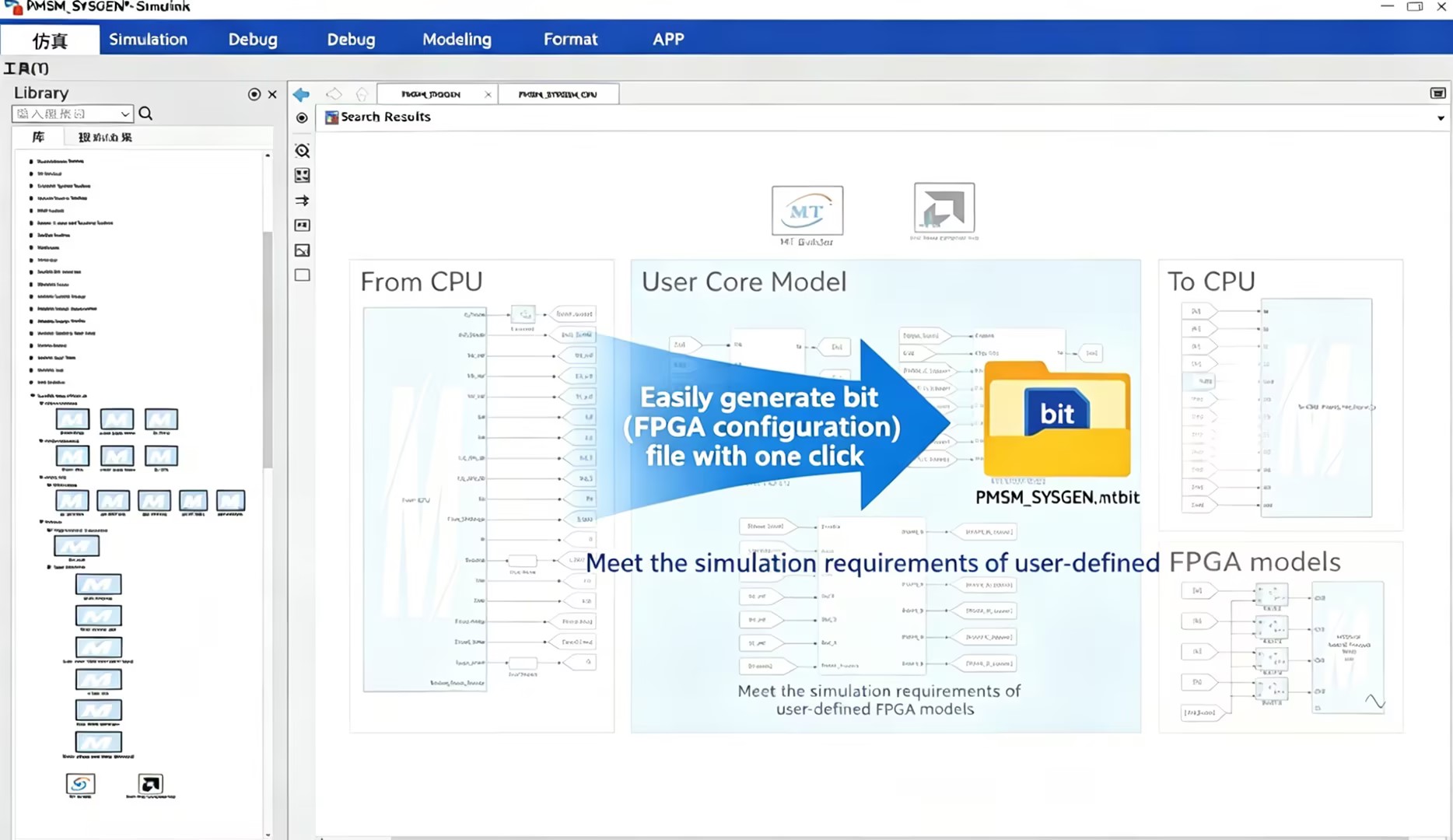
Parameters such as DC-link voltage, switching frequency, dead time, reference speed, reference torque and enable signal can be configured on the host software. After simulation startup, waveforms of motor current, torque output, motor speed and other variables can be visualized on the host PC.
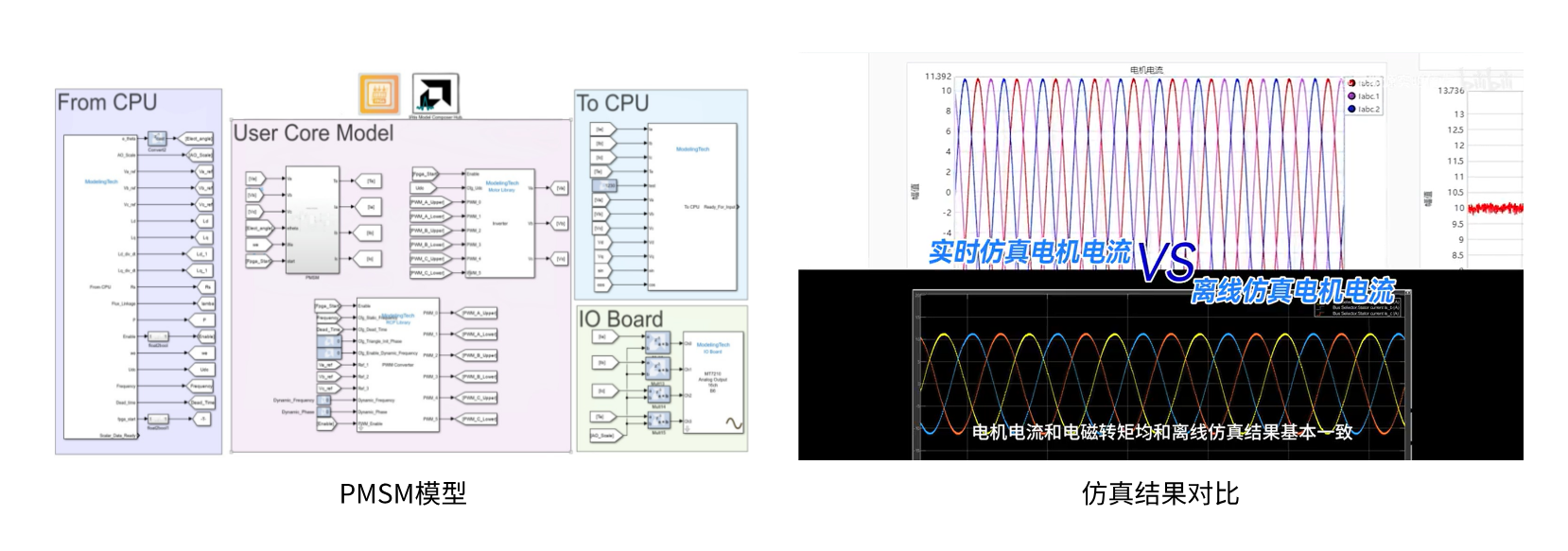
The observed waveforms show that motor current and electromagnetic torque are highly consistent with offline simulation results. Leveraging the CPU-FPGA interaction interfaces and diverse functional modules provided by FPGALab, users can customize and implement various motor models on this platform.


 Technology
Technology

 User Cases
User Cases